
Hexapods / Stewart Platforms in Astronomy
Commercial Stewart-Gough platform and parallel-kinematic hexapod systems for telescope alignment, active optics, image stabilization, radio telescope instrumentation, and precision observatory applications.
The resolution of large ground-based telescopes is often limited by atmospheric turbulence, structural vibrations, and thermal disturbances. Over the past three decades, PI has developed numerous large-aperture fast steering mirrors (FSMs), tip/tilt systems, and hexapod alignment platforms for astronomical image stabilization and optical alignment. Piezo-driven active secondary mirrors can dramatically improve image quality by correcting wavefront distortions and image motion in real time. In many applications, these adaptive optics systems can increase effective resolution by up to an order of magnitude, particularly during long-exposure observations of faint celestial objects. Today, fast steering mirrors are also widely used in free-space optical communications, where they provide high-speed beam stabilization and tracking for satellite-to-satellite and ground-to-satellite links.
More information on FSMs, hexapods and other precision motion systems for Astronomy.
PI's hexapod 6-axis stewart platforms are key components for the precise alignment of active mirrors.
PI precision actuators provide superior performance and lifetime and have been used in large telescopes such as the ALMA Telescope in Chile consisting of 60+ Antennas spread across distances of up to 16 kilometers.

PI has designed a number of Stewart platforms (hexapods) and fast tip/tilt systems for the alignment of mirrors in astronomical telescopes. Talk to a PI engineer for more information.

Active Secondary Hexapod with Tip/Tilt Mirror — NASA IRTF
Active secondary mirror for NASA Infrared Telescope Facility (IRTF) on Mauna Kea, Hawaii, with a hexapod 6D alignment system.
- Mirror diameter: 244 mm
- Tip/tilt range: ±250 µrad
- Resonant frequency: 490 Hz
More Information on Stewart platforms and Tip/Tilt Steering Mirror Platforms for Astronomy

Active Secondary Stewart platform with Tip/Tilt Mirror — UKIRT
Active tip/tilt mirror for the United Kingdom Infrared Telescope (UKIRT) on Mauna Kea, Hawaii, with a secondary hexapod 6D alignment system.
- Mirror diameter: 314 mm
- Tip/tilt range: ±500 µrad
- Resonant frequency: 280 Hz
More Information on 6-Axis Stewart platforms and Fast Steering Mirrors for Astronomy

Miniature Stewart platform for WFIRST Telescope
Custom compact hexapod for prism alignment of the slitless spectrometer for the WFIRST Telescope

Custom Ultra-High-Precision Stewart Platform for Telescopes / Outdoor Operation
Custom secondary 6-axis hexapod for APEX radio telescopy in Chile.
- Load capacity to 750 N
- Unidirectional repeatability to 5 µm
- Clear aperture Ø420 mm
- Long lifetime: 2 million cycles
- Drive: brushless motors
- Protection class IP64
- Corrosion protection
Video on ALMA (Atacama Large Millimeter Array) radio telescope. PI Stewart platform is shown at 0:38.
Compact 6-Axis Motion
Stewart platforms provide X, Y, Z, pitch, roll, and yaw motion from one compact mechanism instead of a stack of individual linear and rotary stages.
High Stiffness
The payload is supported by six parallel struts, helping provide stiffness and stability for optics, mirrors, sensors, and telescope instrumentation.
Reduced Moving Mass
A common moving platform reduces the cumulative moving mass associated with serial stage stacks, improving dynamic behavior and settling.
| Requirement | Why It Matters in Astronomy | Hexapod Advantage |
|---|---|---|
| Mirror Alignment | Secondary mirrors and active optics require precise angular and linear adjustment. | Software-controlled six-axis alignment with a virtual pivot point. |
| Image Stabilization | Atmospheric turbulence and vibration can shift images during observation. | Fast tip/tilt and multi-axis correction can improve effective imaging performance. |
| Large Payloads | Observatory components can be heavy and difficult to align manually. | Parallel-kinematic designs can position high loads with micron-level precision. |
| Vacuum / Non-Magnetic Needs | Space instrumentation and special scientific systems may require low outgassing or non-magnetic operation. | Vacuum-compatible and piezomotor-based non-magnetic hexapod designs are available. |
Active Mirror Positioning
- Secondary mirror alignment
- Tip/tilt image stabilization
- Active optics correction
Radio Telescope Systems
- Reflector positioning
- Antenna alignment
- Sub-micrometer adjustment under harsh conditions
Scientific Instrumentation
- Spectrograph alignment
- Sensor positioning
- Space telescope and satellite receiving antenna systems

All PI Stewart platforms are controlled by a dedicated vector-motion controller specifically developed for six-degree-of-freedom positioning applications. Despite its advanced capabilities, the controller is designed for intuitive operation and seamless integration into laboratory, industrial, and automation environments.
A key feature is the ability to define a virtual pivot point anywhere inside or outside the hexapod workspace through a simple software command. This user-defined center of rotation moves together with the platform, regardless of its position or orientation, providing a powerful advantage in optical alignment, metrology, and precision assembly applications.
Users command motion in familiar Cartesian coordinates, while the controller automatically performs the complex kinematic transformations required to coordinate the individual actuator motions. The latest generation controllers support a wide range of communication interfaces, including TCP/IP for remote, networked, and Industry 4.0 environments, as well as high-speed serial communications for real-time control and system integration.
Learn more about PI hexapods, parallel kinematics, miniature hexapods, high-load hexapods, vacuum-compatible hexapods, and hexapod control software.
Standard HexapodsMiniature HexapodsVacuum HexapodsHigh-Load Hexapods
Additional examples and reference links for hexapod and Stewart-platform applications in astronomy, aerospace, satellite systems, and precision optical alignment.
- PI Hexapod Chosen for LISA Pathfinder Space Mission
- PI Hexapod Stewart Platform Application: Iterative Learning-Based Laser Beam Tracker
- PI Hexapod Stewart Platform Application: Flight-Like Ground Demonstrations of Precision Maneuvers for Spacecraft
- Hexapod Positioning Systems Enable First Image of a Black Hole
- Hexapod Stewart Platform Application Astronomy: Fringe Tracking in the StarLight Formation Interferometer Testbed
- 50 Hexapod Stewart Platforms for ALMA Millimeter Radio Telescope
- One of PI's First Hexapod Alignment Systems in the University of Hawaii 2.2 Meter Fast Tip/Tilt Secondary System
- Hexapod for Satellite Antenna Alignment Control
- Hexapod Alignment System for UKIRT Telescope
- Hexapod for Secondary Mirror Control in SOFIA Telescope
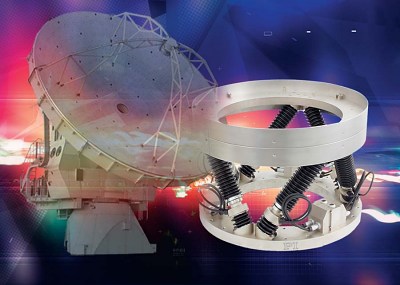
To meet these demanding requirements, PI developed custom hexapod positioning systems capable of handling payloads of up to 75 kg while providing sub-micrometer positioning resolution and exceptional long-term stability. Designed to operate reliably in the harsh environmental conditions of the high-altitude Atacama Desert, these six-axis alignment systems play a critical role in maintaining the accuracy and performance of the telescope array (Photo: Vertex Antennentechnik GmbH).
PI is a leading manufacturer of high-performance Stewart platform-based positioning systems for precision motion applications ranging from industrial automation and semiconductor manufacturing to aerospace, photonics, and scientific research. Based on parallel-kinematics technology, these six-degree-of-freedom positioning platforms provide exceptional precision, stiffness, and dynamic performance in a compact design.
PI hexapods are used in a wide range of applications, including precision assembly, semiconductor manufacturing, machine tool alignment, medical technology, photonics packaging, telescope mirror positioning, satellite antenna alignment, and aerospace testing. Their ability to simultaneously control motion in all six degrees of freedom makes them ideal for demanding positioning, alignment, and motion simulation tasks.
The parallel-kinematic motion systems are available in a variety of sizes and configurations, with payload capacities ranging from a few kilograms to several hundred kilograms and, in specialized applications, up to one metric ton. Depending on the model, positioning resolution can reach the sub-micrometer and even nanometer range while maintaining high stiffness and dynamic performance.
Most Stewart platforms are based on six high-resolution electromechanical or piezoelectric actuators connected between a fixed base and a common moving platform. While the architecture resembles that of a flight simulator, the precision is orders of magnitude higher. Instead of hydraulic cylinders, PI hexapods employ precision-controlled linear or rotary motor drives optimized for accurate positioning and repeatable motion. Different drive technologies are available to meet specific application requirements. Hexapods based on piezo motor technology, for example, offer vacuum compatibility, self-locking operation, low power consumption at standstill, and completely non-magnetic performance, making them ideal for scientific, semiconductor, cryogenic, and aerospace applications.